stage2-ag6
Week6
題目:棒球打擊模擬
構想提出:
方向:球類運動
模擬:coppeliasim
可經由機械手臂達成
1.一個平台(棒球場) 球打出去後可以接球(防守者) 漏接的球可以自動流回輸送台,再次被送回來
2.使用類似螺紋的概念把球輸送到想要的平台
3.希望可以把球的軌跡沿著螺旋線上升
4.做成一個循迴機構
主要物件: 2隻機械手臂、 平台和送球機構
討論結果:
棒球打擊模擬
由stage1延伸
棒球經由機構送達
week7
本週主軸:CoppeliaSim模擬與運送機構創建
整體運用重點
1.本週主軸:CoppeliaSim模擬與運送機構創建
整體運用重點:
1.IK逆運動學
2.正向運動學
3.送球機構創建
本周問題
1.多軸手臂的運動預測
2.送球機構創建未果
3.球受力後的運動路徑預測
問題改善:
1.藉由DH法做運動預期
2.加入運動學運算
CoppeliaSim模擬 手動操控機械手臂

整體運用重點:
1.向本週主軸:CoppeliaSim模擬與運送機構創建
整體運用重點:
1.lua 產生路徑
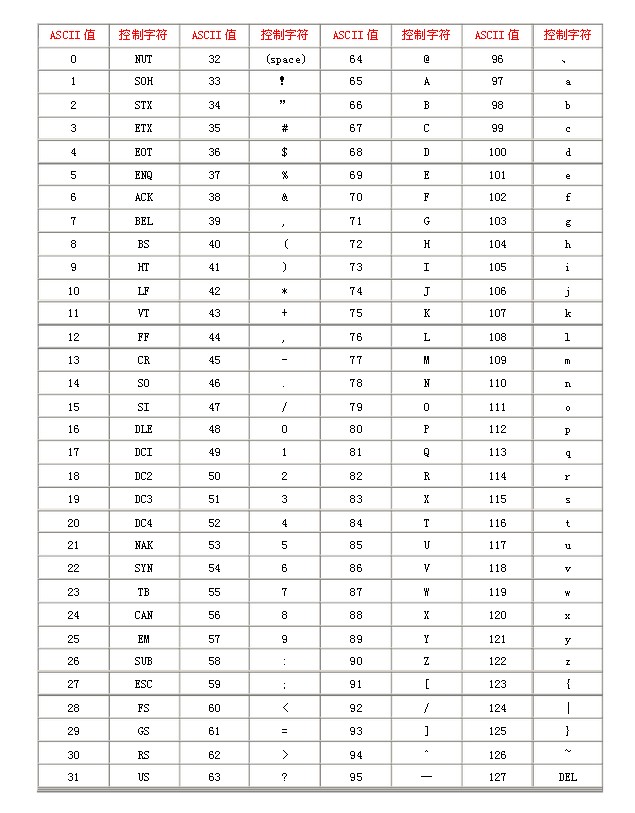
2.鍵盤ASCII控制字符
本週問題
1.控制關節時,每個關節所設置的位置與阻尼參數不同,會有抖動的情形發生
2.關節2的部分因為承受整隻手臂的絕大重量,所以轉動到了一定角度後會因為自身重量而倒下
問題改善
1.所有的參數都設成一樣的並把馬達改成控制模式
2.每隻關節都設置了轉動條件,限制轉動的次數,且設置了兩個參數控制互鎖,並用自身相加方式達成可以重複接收訊號,另外關節2在關節與程式另有限制轉動的角度跟輸入次數,當按下按鍵一定次數後必須往反方向轉動,否則互鎖。
改善前
改善前
機械結構
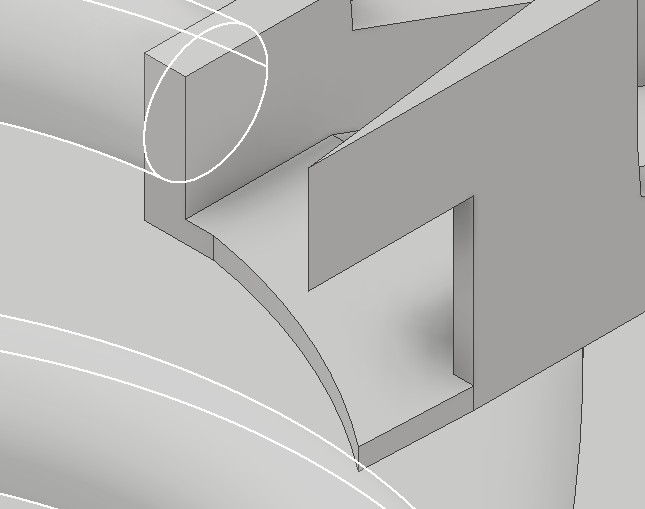
第一次模擬→ 失敗
遇到問題
因為我們是設計螺旋線的上升機構, 所以到輸送平台時把它用直線,導致不符合公差尺寸而跑掉
解決1. 改善後 把它改成符合螺旋線的入口
改善後
week8
本週主軸:機械手臂程式撰寫與送球機構修改
整體運用重點:
1.Lua語言
本週問題
1.送球機構運動結果未達預期
2.球到達定點前即掉落
3.手臂運動路徑不夠近似真實擊球
問題改善:
擋板修改
修改至接近真人手臂擊球的動作
影片
week9
影片
重點總結
機器手臂運動
運動學
Lua程式認知
送球機構修改
專案檢討
同步情形略有改善
分工領域較上次精確
預想模型較上次合理
協同增加分工的效率
總結:
此次專案較stage-1分工更加明確,各領域負責者各司其職,並未因人數增加而導致部分人員偷懶。
在具有stage-1的基礎知識之下,研讀其他文獻時理解也更加快速!
機構預想上較stage-1更加縝密,減少了過於理想化的情況,也因此修改的時間花費更少。